Кинематика - раздел механики, в к-ром изучаются геом. свойства движения тел без учёта их
массы и действующих на них сил. Исходными в К. являются понятия пространства
и времени. В этой статье излагается К. движений, изучаемых в классич. механике;
о К. движений со скоростями, близкими к скорости света, см. Релятивистская
механика (о движениях микрочастиц см. Квантовая механика).
В зависимости от свойств
изучаемого объекта К. можно разделить на: К. точки и твёрдого тела; К. деформируемой
частицы и непрерывной деформируемой среды (упруго или пластически деформируемое
тело, жидкость, газ).
Осн. задачами К. точки
и твёрдого тела являются: описание (с помощью матем. ур-ний, графиков или таблиц)
движений, совершаемых точками или телами по отношению к данной системе отсчёта,
и определение всех кинематич. характеристик этих движений; изучение сложных
(составных) движений точек или тел, т. е. движений, совершаемых по отношению
к нескольким взаимно перемещающимся системам отсчёта, и определение зависимостей
между характеристиками этих движений.
Положение точки или тела
по отношению к данной системе отсчёта определяется к--л. независимыми между
собой параметрами (координатами) g1, q2, . . ., qn, число п к-рых равно числу степеней свободы точки или тела (для точки
, для твёрдого
тела ). Чтобы
описать движение точки или тела по отношению к данной системе отсчёта, нужно
знать его положение по отношению к этой системе в любой момент времени, т. е.
определить координаты qi как функции времени t. Ур-ния
определяющие т. н. закон
движения точки или тела по отношению к данной системе отсчёта, наз. кинематич.
ур-ниями движения. Аналогично определяется закон движения любой механич. системы
точек или тел (напр., механизма). функции, входящие в ур-ния (1), должны быть
однозначными (т. к. система не может занимать в данный момент времени 2 разных
положения в пространстве) н дважды дифференцируемыми (что необходимо для вычисления
скоростей и ускорений). Если движение задано в течение к--н. интервала времени
, то и функции
(1) должны быть определены для этого интервала. В зависимости от того, будут
ли функции (1) заданы аналитически, численно (таблицами) или графически, для решения
задач К. могут применяться ана-литич., численные или графич. методы.
Рассматриваемые обычно
в механике кинематич. характеристики движения выражаются через первые и вторые
производные от координат qi по времени (иногда, напр. в кинематике
механизмов, используются характеристики, выражаемые и через производные более
высокого порядка). Число и вид этих характеристик связаны с особенностями рассматриваемого
движения.
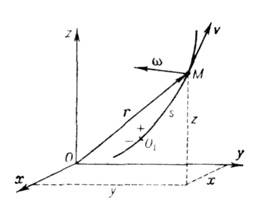
Движение свободной точки
М (рис. 1) определяется тремя ур-ниями вида (1), где q1,
q2, q3 - координаты точки (декартовы, цилиндрические,
сферические или др.). Одновременно эти 3 ур-ния являются параметрич. ур-ниями
траектории точки. Если траектория точки известна заранее, то закон движения
точки можно ещё задать ур-нием s=f(t), где s=O1M - расстояние
точки от выбранного на траектории начала отсчёта O1, измеренное
вдоль траектории и взятое с соответствующим знаком. Кинематич. характеристики
движения точки - её скорость
и ускорение
Число ур-ний, определяющих
закон движения твёрдого тела и его кинематич. характеристики, зависит от вида
движения тела. Простейшими являются поступательное движение и вращательное
движение твёрдого тела. При поступат. движении все точки тела движутся одинаково
и для задания движения тела достаточно задать движение к--н. одной его точки,
наз. полюсом. Следовательно, поступат. движение тела задаётся так же. как движение
точки.
Рис. 1.
Рис. 2.
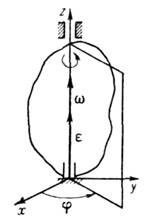
При вращат. движении вокруг
неподвижной оси (рис. 2) тело имеет одну степень свободы и его положение определяется
углом поворота.
Закон этого движения даётся ур-нием
. Кинематич. характеристики движения - угл. скорость
и угл. ускорение
тела.
Более сложным случаем вращат.
движения является движение тела, имеющего одну неподвижную точку (примером такого
движения может служить движение гироскопа ).В этом случае тело имеет
3 степени свободы и его движение описывается тремя ур-ниями вида (1), где q1,
q2, и q3 могут быть, напр., Эйлера угламии.
Движение тела около неподвижной точки слагается из серии элементарных поворотов
вокруг мгновенных осей вращения, проходящих через эту точку. Осн. кинематич.
характеристики движения - вектор мгновенной угл. скорости ,
направленный по мгновенной оси вращения, и вектор мгновенного угл. ускорения
, направленный
параллельно касательной к кривой, описываемой концом вектора
В общем случае движения
свободное твёрдое тело имеет 6 степеней свободы и его движение описывается шестью
ур-ниями вида (1). Параметрами qi в этом случае могут служить
координаты хC , уC , zC к--н. точки
С тела, выбранной в качестве полюса, и углы Эйлера
, определяющие положение тела по отношению к осям, перемещающимся поступательно
вместе с полюсом. В задачах динамики в качестве полюса выбирается обычно центр
масс (центр тяжести) тела.
Движение свободного твёрдого
тела слагается из поступат. движения вместе с полюсом С и серии элементарных
поворотов вокруг мгновенных осей вращения, проходящих через этот полюс. Примерами
такого рода движения являются движения в воздухе артиллерийских снарядов, ракет,
самолётов, движения небесных тел и др. Кинематич. характеристиками движения
служат поступат. скорость и поступат. ускорение, равные скорости и ускорению
полюса, а также мгновенная угл. скорость
и мгновенное угл. ускорение
движения тела вокруг
полюса. Важно отметить, что от выбора полюса величины
не зависят и вычисляются так же, как при движении тела около неподвижной точки.
Скоростьи
ускорение
любой точки М тела в этом движении слагаются геометрически из скорости
(или ускорения) полюса С и скорости (ускорения), получаемых точкой М при вращении тела вокруг полюса. Кроме того, при любом движении твёрдого
тела проекции скоростей
и к--н.
двух его точек А и В на прямую АВ равны друг другу. Частным
случаем рассмотренного движения является плоскопараллельное движение твёрдого
тела, при к-ром все точки тела движутся параллельно нек-рой неподвижной плоскости.
Сложным или составным движением
точки (или тела) наз. движение, рассматриваемое одновременно по отношению к
двум (и более) системам отсчёта, из к-рых одна условно считается неподвижной,
а другая опре-дел. образом движется по отношению к первой. Движение, совершаемое
при этом точкой или телом по отношению к подвижной системе отсчёта, наз. о т
н о с и-т е л ь н ы м; движение самой подвижной системы отсчёта и всех неизменно
связанных с ней точек по отношению к системе, принимаемой за неподвижную, является
для движущейся точки (тела) переносным; наконец, движение точки (тела) по отношению
к системе отсчёта, принимаемой за неподвижную, наз. абсолютным или сложным.
Абс. скорость
точки, совершающей сложное движение, равна геом. сумме относительной и переносной
скоростей:
а абс. ускорение
равно геом. сумме трёх ускорений: относительного, переносного и поворотного,
или Кори-олиса ускорения:
При сложном движении твёрдого
тела, когда его составные движения являются поступательными, абс. движение тела
также будет поступательным со скоростью, определяемой равенством (2). Если составные
движения тела - вращательные вокруг двух пересекающихся или параллельных мгновенных
осей вращения, причём
, то результирующее движение будет также вращательным с угл. скоростью
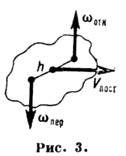
. В случае, когда,
т. е. когда составными движениями тел являются мгновенные вращения вокруг двух
параллельных осей с угл. скоростями, равными по модулю и противоположными по
направлению (пара вращений), результирующим движением будет мгновенное поступат.
движение со скоростью
(рис. 3), направленной так же, как направлен вектор момента пары сил. Если составными
движениями тела являются вращение вокруг нек-рой оси и поступат. движение по
направлению, параллельному этой оси, то результирующим движением тела является
винтовое движение .В самом общем случае, когда тело одновременно участвует
в ряде мгновенных вращат. и поступат. движений, его результирующее движение
есть мгновенное винтовое.
В задачи К. деформируемой
среды входит рассмотрение общей теории деформаций и определение т. н. ур-ний
неразрывности, отражающих условие непрерывности среды, а также установление
методов задания движения непрерывной среды и определение кинематич. характеристик
этого движения (подробнее см. Упругости теория и Гидроаэромеханика).
Устанавливаемые в К. понятия
и зависимости используются как вспомогательные при решении задач динамики. Кроме того, методы К. имеют самостоят. значение при расчётах передач движений
в разл. механизмах, машинах и др.
Литература по кинематике
Жуковский Н. Е., Теоретическая механика, 2 изд., М--Л., 1952;
Лойцянский Л. Г., Лурье А. И., Курс теоретической механики, т. 1 - Статика и кинематика, 8 изд., М., 1982;
Галилей Г., Соч., [пер. с итал.], т. 1, M.- Л., 1934;
Эйлер Л., Основы динамики точки, пер. с лат., М.- Л., 1938;
Д-Аламбер Щ., Динамика, пер. с франц., M.- Л., 1950;
Лагранж Ж., Аналитическая механика, пер. с франц., т. 1-2, 2 изд., M.- Л., 1950;
Жуковский H. E., Теоретическая механика, 2 изд., M.- Л., 1952;
Бухгольц H. H., Основной курс теоретической механики, ч. 1, 9 изд., ч. 2, 6 изд., M., 1972;
История механики с древнейших времен до конца XVIII в., M., 1971;
Веселовский И. H., Очерки по истории теоретической механики, M., 1974;
Механика в СССР за 50 лет, т. 1-3, M., 1968-72;
Кочин H. E., Кибель И. A., Pозе H. В., Теоретическая гидромеханика, ч. 1, 6 изд., ч. 2, 4 изд., M., 1963;
Прандтль Л., Гидроаэромеханика, пер. с нем., M., 1949;
Лойцянский Л. Г., Механика жидкости и газа, 5 изд., M., 1978,
Кларк Д., Макчесни M., Динамика реальных газов, пер. с англ., M., 1967;
Седов Л. И., Механика сплошной среды, т. 1-2, 4 изд., M., 1983-84.
Ляв А. Математическая теория упругости, пер. с англ., М.- Л., 1935;
Стретт Дж. В. (лорд Рэлей), Теория звука, пер. с англ., 2 изд., т. 1-2, М., 1955;
Боли Б., Уэйнер Дж., Теория температурных напряжений, пер. с англ., М., 1964;
Трехмерные задачи математической теории упругости и термоупругости, под ред. В. Д. Купрадзе, 2 изд., М., 1976;
Тимошенко С. П., Гудьер Дж., Теория упругости, пер. с англ., 2 изд., М., 1979;
Хан X., Теория упругости. Основы линейной теории и её применение, пер. с нем., М., 1988.
Соколовский В. В., Теория пластичности, 3 изд., М., 1969;
Прагер В., Xодж Ф., Теория идеально пластических тел, пер. с англ., М., 1956;
Xилл Р., Математическая теория пластичности, пер. с англ., М., 1956;
Кадашевич Ю. И., Новожилов В. В., Теория пластичности, учитывающая остаточные микронапряжения, "ПММ", 1958, т. 22, с. 78;
Ильюшин А. А., Пластичность. Основы общей математической теории, М., 1963;
Ивлев Д. Д., Быковцев Г. И., Теория упрочняющегося пластического тела, М., 1971;
Ревуженко А. Ф., Чанышев А. И., Шемякин Е. И., Математические модели упругопластических тел, в сб.: Актуальные проблемы вычислительной математики и математического моделирования, Новосиб., 1985.
Знаете ли Вы, что, как и всякая идолопоклонническая религия, релятивизм представляет собой инструмент идеологического подчинения одних людей другим с помощью абсолютно бессовестной манипуляции их психикой для достижения интересов определенных групп людей, стоящих у руля этой воровской машины? Подробнее читайте в FAQ по эфирной физике.
 , для твёрдого
тела
, для твёрдого
тела  ). Чтобы
описать движение точки или тела по отношению к данной системе отсчёта, нужно
знать его положение по отношению к этой системе в любой момент времени, т. е.
определить координаты qi как функции времени t. Ур-ния
). Чтобы
описать движение точки или тела по отношению к данной системе отсчёта, нужно
знать его положение по отношению к этой системе в любой момент времени, т. е.
определить координаты qi как функции времени t. Ур-ния
 , то и функции
(1) должны быть определены для этого интервала. В зависимости от того, будут
ли функции (1) заданы аналитически, численно (таблицами) или графически, для решения
задач К. могут применяться ана-литич., численные или графич. методы.
, то и функции
(1) должны быть определены для этого интервала. В зависимости от того, будут
ли функции (1) заданы аналитически, численно (таблицами) или графически, для решения
задач К. могут применяться ана-литич., численные или графич. методы. и ускорение
и ускорение
 .
Закон этого движения даётся ур-нием
.
Закон этого движения даётся ур-нием . Кинематич. характеристики движения - угл. скорость
. Кинематич. характеристики движения - угл. скорость  и угл. ускорение
и угл. ускорение  тела.
тела. и
и .
Движение тела около неподвижной точки слагается из серии элементарных поворотов
вокруг мгновенных осей вращения, проходящих через эту точку. Осн. кинематич.
характеристики движения - вектор мгновенной угл. скорости
.
Движение тела около неподвижной точки слагается из серии элементарных поворотов
вокруг мгновенных осей вращения, проходящих через эту точку. Осн. кинематич.
характеристики движения - вектор мгновенной угл. скорости  ,
направленный по мгновенной оси вращения, и вектор мгновенного угл. ускорения
,
направленный по мгновенной оси вращения, и вектор мгновенного угл. ускорения
 , направленный
параллельно касательной к кривой, описываемой концом вектора
, направленный
параллельно касательной к кривой, описываемой концом вектора
 , определяющие положение тела по отношению к осям, перемещающимся поступательно
вместе с полюсом. В задачах
, определяющие положение тела по отношению к осям, перемещающимся поступательно
вместе с полюсом. В задачах  и мгновенное угл. ускорение
и мгновенное угл. ускорение движения тела вокруг
полюса. Важно отметить, что от выбора полюса величины
движения тела вокруг
полюса. Важно отметить, что от выбора полюса величины не зависят и вычисляются так же, как при движении тела около неподвижной точки.
Скорость
не зависят и вычисляются так же, как при движении тела около неподвижной точки.
Скорость и
ускорение
и
ускорение любой точки М тела в этом движении слагаются геометрически из скорости
(или ускорения) полюса С и скорости (ускорения), получаемых точкой М при вращении тела вокруг полюса. Кроме того, при любом движении твёрдого
тела проекции скоростей
любой точки М тела в этом движении слагаются геометрически из скорости
(или ускорения) полюса С и скорости (ускорения), получаемых точкой М при вращении тела вокруг полюса. Кроме того, при любом движении твёрдого
тела проекции скоростей  и
и  к--н.
двух его точек А и В на прямую АВ равны друг другу. Частным
случаем рассмотренного движения является плоскопараллельное движение твёрдого
тела, при к-ром все точки тела движутся параллельно нек-рой неподвижной плоскости.
к--н.
двух его точек А и В на прямую АВ равны друг другу. Частным
случаем рассмотренного движения является плоскопараллельное движение твёрдого
тела, при к-ром все точки тела движутся параллельно нек-рой неподвижной плоскости. точки, совершающей сложное движение, равна геом. сумме относительной и переносной
скоростей:
точки, совершающей сложное движение, равна геом. сумме относительной и переносной
скоростей:
 равно геом. сумме трёх ускорений: относительного, переносного и поворотного,
или Кори-олиса ускорения:
равно геом. сумме трёх ускорений: относительного, переносного и поворотного,
или Кори-олиса ускорения:
 , то результирующее движение будет также вращательным с угл. скоростью
, то результирующее движение будет также вращательным с угл. скоростью  . В случае, когда
. В случае, когда ,
т. е. когда составными движениями тел являются мгновенные вращения вокруг двух
параллельных осей с угл. скоростями, равными по модулю и противоположными по
направлению (пара вращений), результирующим движением будет мгновенное поступат.
движение со скоростью
,
т. е. когда составными движениями тел являются мгновенные вращения вокруг двух
параллельных осей с угл. скоростями, равными по модулю и противоположными по
направлению (пара вращений), результирующим движением будет мгновенное поступат.
движение со скоростью  (рис. 3), направленной так же, как направлен вектор момента пары сил. Если составными
движениями тела являются вращение вокруг нек-рой оси и поступат. движение по
направлению, параллельному этой оси, то результирующим движением тела является
(рис. 3), направленной так же, как направлен вектор момента пары сил. Если составными
движениями тела являются вращение вокруг нек-рой оси и поступат. движение по
направлению, параллельному этой оси, то результирующим движением тела является