
Принцип возможных перемещений (виртуальных перемещений принцип) - один из осн. принципов механики, выражающий
общее условие равновесия механич. системы. При рассмотрении условий равновесия
механич. системы методами геом. статики действие наложенных на систему связей
(см. Связи механические)учитывается введением соответствующих наперёд
неизвестных сил, наз. реакциями связей. Для сложных систем применение этого
метода приводит к необходимости решать большое число алгебраич. ур-ний со мн.
неизвестными. В методе решения задач статики, вытекающем из
принципа возможных перемещений, учёт наложенных
на систему связей производится введением понятия о т. н. возможных перемещениях системы из рассматриваемого положения. При этом в случае идеальных связей
вообще не возникает необходимости рассматривать реакции, что значительно облегчает
решение и расширяет класс разрешимых задач.
Условие равновесия, даваемое принципом возможных перемещений, гласит: для равновесия любой механич. системы с удерживающими идеальными
связями необходимо и достаточно, чтобы сумма элементарных работ действующих
на неё активных сил при любом возможном перемещении системы была равна нулю.
Математически принцип возможных перемещений выражается ур-нием:
где Fi - равнодействующая всех активных сил, приложенных к i-й точке системы;
Xi, Yi, Zi - проекции силы Fi на оси прямоугольной системы координат; - модуль возможного перемещения s-й точки;
- модуль возможного перемещения s-й точки;
 - проекции этого перемещения
на те же оси;
- проекции этого перемещения
на те же оси;  - угол между направлениями силы и возможного перемещения.
Принцип возможных перемещений можно пользоваться
и при наличии в системе связей с трением, если силы трения включить в число
активных сил.
- угол между направлениями силы и возможного перемещения.
Принцип возможных перемещений можно пользоваться
и при наличии в системе связей с трением, если силы трения включить в число
активных сил.
Принцип возможных перемещений применяется при
изучении условий равнове сия сложных механич. систем (механизмы, машины и др.).
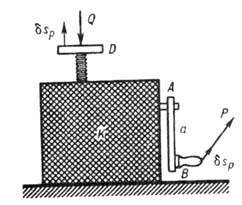
Особенно просто с помощью принципа возможных перемещений находятся условия равновесия системы, имеющих
одну степень свободы (см. Степеней свободы число ).Напр., для подъёмного
механизма (рис.), детали к-рого скрыты в коробке К, ур-ние (1) даёт условие
равновесия:

(P и Q - действующие
силы).
Связь между перемещениями
 можно установить,
если известно, что равномерному вращению рукоятки
АВ соответствует равномерный подъём винта D, причём за каждый
полный оборот рукоятки подъём винта равен h; тогда искомая связь даётся
пропорцией
можно установить,
если известно, что равномерному вращению рукоятки
АВ соответствует равномерный подъём винта D, причём за каждый
полный оборот рукоятки подъём винта равен h; тогда искомая связь даётся
пропорцией  : h, где а - длина рукоятки. Из ур-ния (2) определяется условие равновесия
механизма: Р=
: h, где а - длина рукоятки. Из ур-ния (2) определяется условие равновесия
механизма: Р= Методами геом. статики рассмотренная задача (если не будут указаны все детали
скрытого в коробке механизма) вообще решена быть не может. Для систем с неск.
степенями свободы ур-ния (1) можно составлять для каждого независимого перемещения
системы в отдельности.
Методами геом. статики рассмотренная задача (если не будут указаны все детали
скрытого в коробке механизма) вообще решена быть не может. Для систем с неск.
степенями свободы ур-ния (1) можно составлять для каждого независимого перемещения
системы в отдельности.
Принцип возможных перемещений широко используются
также в статике деформируемых (твёрдых и жидких) тел. При этом учитываются все
действующие на тело объёмные и поверхностные силы, включая внутр. напряжения,
а суммирование в ур-ние (1) заменяется интегрированием соответственно но объёму
и поверхности тела.
О применении метода, аналогичного
даваемому принципом возможных перемещений к решению задач динамики, см. Д-Аламбера- Лагранжа
принцип.

С. M. Тарг
Понятие же "физического вакуума" в релятивистской квантовой теории поля подразумевает, что во-первых, он не имеет физической природы, в нем лишь виртуальные частицы у которых нет физической системы отсчета, это "фантомы", во-вторых, "физический вакуум" - это наинизшее состояние поля, "нуль-точка", что противоречит реальным фактам, так как, на самом деле, вся энергия материи содержится в эфире и нет иной энергии и иного носителя полей и вещества кроме самого эфира.
В отличие от лукавого понятия "физический вакуум", как бы совместимого с релятивизмом, понятие "эфир" подразумевает наличие базового уровня всей физической материи, имеющего как собственную систему отсчета (обнаруживаемую экспериментально, например, через фоновое космичекое излучение, - тепловое излучение самого эфира), так и являющимся носителем 100% энергии вселенной, а не "нуль-точкой" или "остаточными", "нулевыми колебаниями пространства". Подробнее читайте в FAQ по эфирной физике.
|
|
