Возможные перемещения (виртуальные перемещения) - бесконечно малые перемещения, к-рые могут совершать
точки механич. системы из рассматриваемого в данный момент времени положения,
не нарушая наложенных на систему в этот момент времени связей (см. Связи
механические).
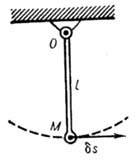
Напр., для груза, подвешенного
на стержне длиной l к неподвижному сферич. шарниру О (рис.), В.
п. из положения M будет любое бесконечно малое перемещение  ,
перпендикулярное МO, т. е. направленное по касательной к поверхности
сферы радиуса l. При атом безразлично, находится ли груз в положении
M в покое или движется и проходит через положение M в какой-то
момент времени t. В последнем случае груз, продолжая движение, совершит
из положения M за промежуток времени dt действит. элементарное
перемещение ds, к-рое совпадает с одним из В. п. Этот результат имеет
место всегда, когда связь стационарна (не изменяется со временем).
,
перпендикулярное МO, т. е. направленное по касательной к поверхности
сферы радиуса l. При атом безразлично, находится ли груз в положении
M в покое или движется и проходит через положение M в какой-то
момент времени t. В последнем случае груз, продолжая движение, совершит
из положения M за промежуток времени dt действит. элементарное
перемещение ds, к-рое совпадает с одним из В. п. Этот результат имеет
место всегда, когда связь стационарна (не изменяется со временем).
Если же шарнир укреплён
на ползуне, к-рый будет перемещаться, напр., вертикально вниз, то получится
случай нестационарной связи (связи, изменяющейся со временем). Когда при этом
груз в какой-то момент времени t придёт в положение M, то его
В. п. из данного положения в этот момент времени будет по-прежнему любое бесконечно
малое перемещение  ,
перпендикулярное МО. Однако действит. перемещение, к-рое груз совершит
за промежуток времени dt, продолжая своё движение из положения M вместе
со стержнем, не будет, очевидно, совпадать ни с одним из В. п. груза в положении
M.
,
перпендикулярное МО. Однако действит. перемещение, к-рое груз совершит
за промежуток времени dt, продолжая своё движение из положения M вместе
со стержнем, не будет, очевидно, совпадать ни с одним из В. п. груза в положении
M.
Если стержень OM заменить
нерастяжимой нитью, то связь станет неудерживающей. В этом случае В. п. груза
из положения M будут не только все перемещения, перпендикулярные нити,
но и перемещения, направленные
во внутрь сферы радиуса l с центром в точке О. Если положение
механич. системы однозначно определяется п независимыми между собой параметрами,
q1, q2,. . . , qn, то В. п. каждой
точки системы, положение к-рой определяется её радиусом-вектором rk, где rk=rk(q1,
q2,...,qn), будет:

В случае нестационарных
связей равенства, выражающие зависимость rk
от qi, будут содержать время t и rk=rk(t,q1,
q2,...,qi). Однако ф-ла (*) при этом сохраняется,
а время t считается равным пост. величине t1, где t1
- значение момента времени, в к-рый вычисляется В. п.
Понятие о В. п. используется в механике для определения условий равновесия и составления ур-ний движения механич. систем (см. Возможных перемещений принцип). С. M. Тарг.

1. Электромагнитная волна (в религиозной терминологии релятивизма - "свет") имеет строго постоянную скорость 300 тыс.км/с, абсурдно не отсчитываемую ни от чего. Реально ЭМ-волны имеют разную скорость в веществе (например, ~200 тыс км/с в стекле и ~3 млн. км/с в поверхностных слоях металлов, разную скорость в эфире (см. статью "Температура эфира и красные смещения"), разную скорость для разных частот (см. статью "О скорости ЭМ-волн")
2. В релятивизме "свет" есть мифическое явление само по себе, а не физическая волна, являющаяся волнением определенной физической среды. Релятивистский "свет" - это волнение ничего в ничем. У него нет среды-носителя колебаний.
3. В релятивизме возможны манипуляции со временем (замедление), поэтому там нарушаются основополагающие для любой науки принцип причинности и принцип строгой логичности. В релятивизме при скорости света время останавливается (поэтому в нем абсурдно говорить о частоте фотона). В релятивизме возможны такие насилия над разумом, как утверждение о взаимном превышении возраста близнецов, движущихся с субсветовой скоростью, и прочие издевательства над логикой, присущие любой религии.
4. В гравитационном релятивизме (ОТО) вопреки наблюдаемым фактам утверждается об угловом отклонении ЭМ-волн в пустом пространстве под действием гравитации. Однако астрономам известно, что свет от затменных двойных звезд не подвержен такому отклонению, а те "подтверждающие теорию Эйнштейна факты", которые якобы наблюдались А. Эддингтоном в 1919 году в отношении Солнца, являются фальсификацией. Подробнее читайте в FAQ по эфирной физике.
|
|
