Цифровые системы, осуществляющие управление в реальном масштабе времени и использующие ЭВМ для формирования закона управления, являются весьма сложными для анализа гибридными объектами. В настоящее время такие системы как правило выполняются на базе многозадачных управляющих контроллеров и имеют сетевую организацию. Различные части системы имеют разную природу (непрерывный объект и дискретная управляющая часть), а система в целом описывается сложной комбинацией дифференциальных уравнений, алгебраических уравнений и неравенств и логических условий. Поскольку для преобразований аналог-код и код-аналог и других вычислений, а также для передачи информации по сети требуется определенное время, при реализации цифрового управления возникает временная задержка. Это приводит к снижению качества управления, иногда до недопустимо низкого уровня. Чтобы избежать негативного влияния такого запаздывания и оптимально использовать доступные системе управления вычислительные ресурсы, проектирование алгоритмов управления и программного обеспечения должно вестись с учетом данного фактора.
В теории цифрового управления интервалы осуществления выборки обычно принимаются одинаковыми, а задержка управления считается несущественной или постоянной. Однако на практике это имеет место лишь в редких случаях. В контроллере задачи накладываются друг на друга и блокируются в ожидании общих ресурсов. Время выполнения самих задач может изменяться. Передача данных по сети происходит с задержками, величина и стабильность которых зависит как от протокола связи, так и от загруженности каналов. В этих условиях аналитический анализ поведения цифровых систем управления затруднен, наиболее естественным представляется путь имитационного моделирования.
Разработка имитационной модели гибридной системы, характеризующейся переменным значением шага квантования, может вестись различными способами. Среди готовых инструментов моделирования можно выделить построенный на базе пакета MATLAB симулятор TrueTime [1]. Желающие оставаться в рамках стандартного набора MATLAB могут построить Simulink-модель, используя в качестве примера модель дискретной системы с переменным тактом квантования [2].
Еще один вариант, представляющийся наиболее естественным, заключается в применении наряду с Simulink программы Stateflow. Специально разработанный для моделирования дискретных управляющих устройств и систем, Stateflow дополняет и расширяет возможности Simulink. В Simulink достаточно просто моделируются непрерывные объекты. Используя язык диаграмм состояний и переходов, можно получить в Stateflow описание управляющей части моделируемой системы. При этом алгоритм управления может иметь сколь угодно высокую сложность, временные задержки могут быть как детерминированными, так и носить случайный характер. Дополнительная возможность следить в режиме реального времени за процессом выполнения Stateflow-диаграммы путем включения режима анимации делает процесс моделирования по-настоящему наглядным.
Рассмотрим в качестве примера модель цифровой системы управления объектом <перевернутый маятник>. Передаточная функция объекта имеет вид
![]() .
.
В качестве регулятора выберем звено с передаточной функцией
![]() .
.
Модель непрерывной системы приведена на рис. 1, а переходный процесс в системе стабилизации маятника в вертикальном положении - на рис. 2.
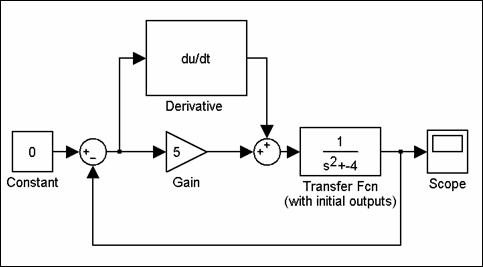
Рис. 1. Модель непрерывной системы стабилизации маятника.
Модель непрерывной системы можно скачать здесь.
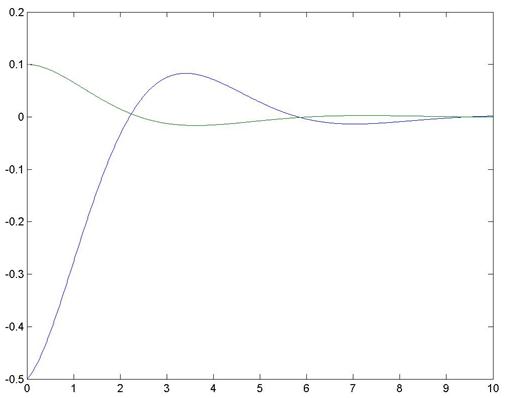
Рис. 2. Переходный процесс в непрерывной системе стабилизации маятника.
Рассмотрим теперь цифровую систему управления, реализуя регулятор средствами Stateflow. Модель системы управления примет следующий вид (рис. 3).
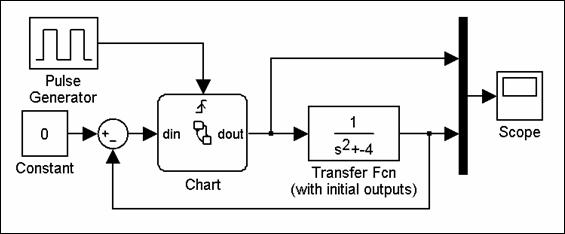
Рис. 3. Модель цифровой системы стабилизации маятника.
Цифровой вариант регулятора будет иметь передаточную функцию
![]() ,
,
где h - шаг квантования. Stateflow-модель цифрового регулятора представлена на рисунке 4.
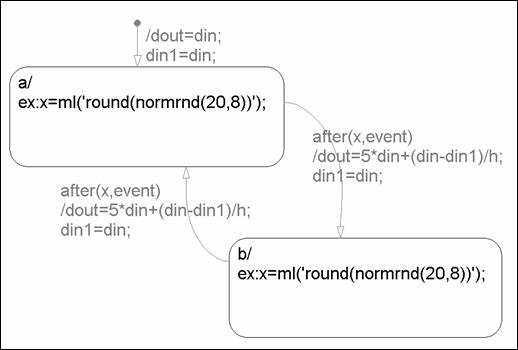
Рис. 4. Stateflow-модель цифрового регулятора.
Эта модель реализует переменную временную задержку в канале управления, изменяющуюся случайным образом в соответствии с нормальным законом с параметрами 0.2 с и 0.08 с. Переход из одного состояния в другое сопровождается вычислением нового значения сигнала управления, который действует на объект в течение следующего такта. Переходные процессы в системе представлены на рис. 5. Зеленым цветом обозначен сигнал dout - выходной сигнал регулятора.
Модель дискретной системы с переменным шагом квантования можно скачать здесь.
Для сравнения на рис. 6 представлены переходные процессы в системе с постоянным шагом квантования 0.2 с.
Модель дискретной системы с постоянным шагом квантования можно скачать здесь.
Результат работы системы может оцениваться по интегральному среднеквадратичному критерию качества
![]() ,
,
где ε - ошибка системы, Т - время окончания процесса регулирования. Исследование рассмотренных выше моделей показало, что наилучшим качеством обладает непрерывная система, для которой I = 0.009985. У цифровой системы с постоянным шагом квантования 0.2 с I = 0.01032. В случае цифровой системы с непостоянным шагом квантования среднее значение критерия равнялось 0.01061, хотя в некоторых редких случаях оно было меньше, чем у непрерывной системы.
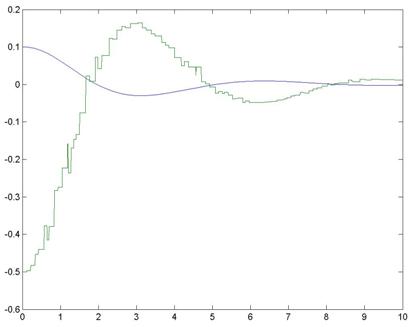
Рис. 5. Переходный процесс в дискретной системе с переменной временной задержкой.
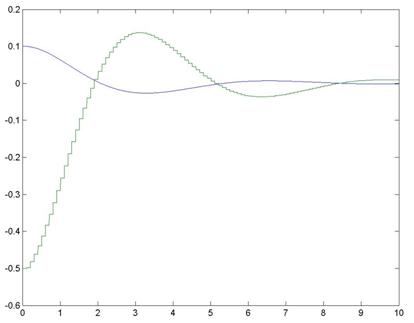
Рис. 6. Переходный процесс в дискретной системе с постоянной временной задержкой.
Литература
1. Henriksson D., Cervin A., Årzén K. E. TrueTime: Simulation of control loops under shared computer resources // Proc. of the 15th IFAC World Congress on Automatic Control.- Barcelona, Spain, July 2002.
2. Черных И. В. Simulink: среда создания инженерных приложений.- М.: Диалог-МИФИ, 2003.- 496 с.
|
|
