Имитация поведения системы
в виде сети Петри все чаще применяется для анализа производственных
систем, процессов передачи информации, распределенных вычислительных
систем и решения других задач [1]. Сеть Петри представляет собой
ориентированный граф с вершинами двух типов: позициями Pi и переходами
Tj. Вершины соединены дугами. Поведение системы имитируется движением
маркеров через переходы от начальной к конечной позициям. Маркеры
задерживаются в промежуточных позициях на время выполнения технологических
операций. Логику процесса задают правилами движения маркеров через
переходы Tj:
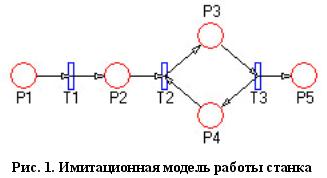
На рис. 1 показана сеть Петри, имитирующая
работу станка. При наличии маркера (заготовки) в позиции Р1 открывается
переход T1 и маркер переходит в позицию Р2 (заготовка во входном
накопителе). Если станок настроен на данную операцию (наличие маркера в
позиции Р4), срабатывает переход T2 и происходит процесс обработки
заготовки на станке (Р3). По окончании обработки открывается переход T3 и
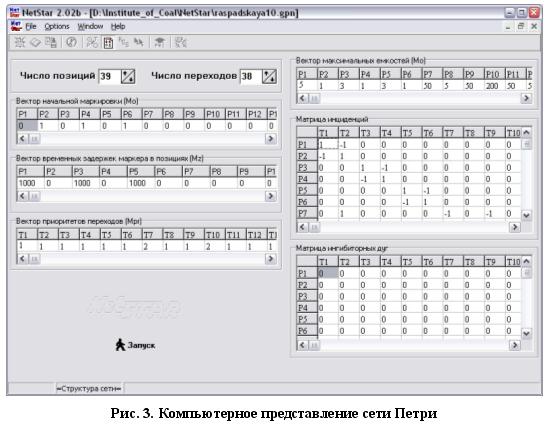
деталь поступает в выходной накопитель (Р5). Для ввода сети в
компьютер ее структуру задают матрицей инциденций, вектором приоритетов
переходов и матрицей ингибиторных дуг, а параметры – векторами временных
задержек маркеров в позициях и начальной маркировки позиций. После
компьютерного представления сети проводят имитационные эксперименты с
целью выбора структуры и параметров системы. С 1991 г. разработано
восемь версий имитатора сетей Петри. Главным требованием было обеспечение
работы с имитатором непрограммирующих пользователей – исследователя
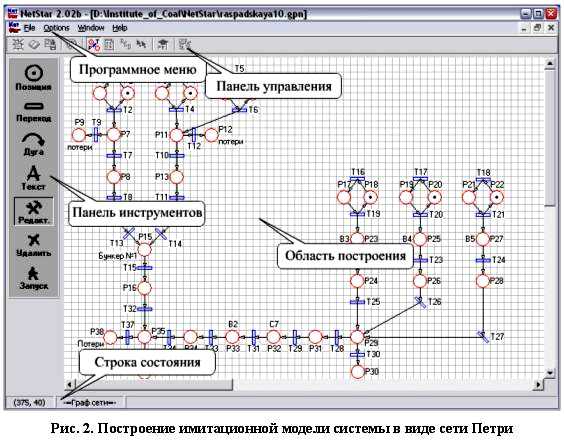
системы, технолога или студента. В последней версии NetStar 2.02 возможно
построение и редактирование сети Петри [2]. Позиции, переходы и дуги сети
переносят из встроенной библиотеки в область построения модели (рис. 2).
Их параметры задают в окнах, появляющихся после выбора элемента сети.
Предусмотрен ввод текстового комментария к элементу сети. Имитация ведется
в режимах фиксированного временного шага и от события к событию.
Отредактированная сеть Петри автоматически преобразуется в набор векторов и матриц (рис. 3).
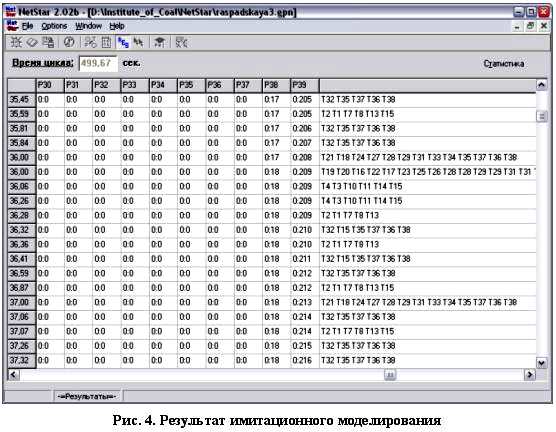
Пользователь задает время и шаг имитации. В
результате имитации выводится матрица текущей маркировки, по шагам
отображающая перемещение маркеров по позициям сети Петри (рис. 4). Общее
время перемещения определяют по номеру шага, на котором маркеры поступают
в последнюю позицию сети. С 1993 г. имитатор применяется в учебном
процессе КемГУ и КузГТУ, а также в научных исследованиях Института угля
Сибирского отделения РАН.
Учебный процесс
На основе имитатора
разработаны лабораторные практикумы по дисциплинам «Основы промышленной
робототехники» [3] и «Гибкие производственные системы» [4]. Для работы с
имитатором необходимо пройти тестирование и получить допуск к лабораторной
работе [5]. С помощью имитатора студенты выбирают структуру
роботизированного технологического комплекса (РТК) и гибкой
производственной системы (ГПС), определяют характеристики оборудования,
отыскивают «узкие места» в технологическом процессе, согласовывают
скорости единиц оборудования, оценивают живучесть и производительность
РТК и ГПС, анализируют возможность группового обслуживания оборудования,
определяют емкости промежуточных накопителей, анализируют работу
сборочных линий в толкающем и тянущем («Just-In-Time») режимах, исследуют
влияние времени переналадки оборудования на производительность. Выполнение
лабораторной работы включает 4 этапа. 1. Построение сети Петри по
описанию технологического процесса.
1.1. Выбор лабораторной
работы. 1.2. Словесное описание технологического процесса. 1.3.
Расчет времени выполнения технологических операций. 1.4. Формирование
логических условий процесса. 1.5. Составление сети Петри.
2.
Ввод имитационной модели в компьютер. 2.1. Составление матрицы
инциденций. 2.2. Составление матрицы ингибиторных дуг. 2.3.
Формирование векторов начальной маркировки, временных задержек и
приоритетов переходов. 2.4. Задание времени и шага имитации. 2.5.
Ввод структуры и параметров сети в оболочку имитатора.
3.
Проведение имитационных экспериментов. 3.1. Запуск имитационного
моделирования процесса для исходных данных. 3.2. Оценка времени
движения маркеров от начальной к конечной позициям. 3.3. Изменение
структуры или параметров модели.
4. Обработка результатов
эксперимента. 4.1. Построение зависимостей технологических показателей
от вводимых изменений структуры и параметров оборудования. 4.2. Выбор
варианта технологического процесса. 4.3. Время освоения аппарата сетей
Петри и работы с имитатором не превышало одного занятия.
Исследование сети подземного конвейерного транспорта[6]
На крупнейшей российской шахте «Распадская» из 8 рассредоточенных под землей забоев
поступают случайные потоки угля. Уголь транспортируется 10 конвейерами к 4
бункерам, откуда двумя конвейерами по наклонному стволу выдается на
поверхность. Имитационное моделирование применялось с целью согласования
работы забоев и элементов транспортной сети во времени и пространстве.
Работа забоев, конвейеров и заполнение бункеров, как одинаковых для любой
шахты модулей, отображалась отдельными сетями Петри, которые объединялись
в общую сеть Петри, имитирующую работу транспортной сети конкретной шахты.
Цель имитационных экспериментов – оценка пропускной способности сети при
изменении параметров ее элементов.
Управление подземным конвейернолокомотивным транспортом [7]
Проблема заключается в
согласовании работы непрерывного и дискретного видов транспорта при
случайных потоках угля из четырех забоев. Имитационное моделирование
ведется синхронно с реальным транспортированием. Сеть Петри состоит из 50
позиций и переходов. Перед выбором решения диспетчер прогнозирует его
последствия, ускоряя имитационное моделирование.
Поставщику поступают
случайные заявки от распределенных потребителей. Задан минимальный объем
отдельной поставки. Необходимо выбрать план поставок, обеспечивающий
максимум прибыли поставщика. Результаты имитации планов поставки
выводятся на мнемосхему взаимодействия поставщика и потребителей.
Обеспечение отказоустойчивости сборочной линии [9]
Сборку ведут роботы,
размещенные вдоль сборочной линии. При случайном отказе одного из роботов
оставшиеся роботы должны перераспределить между собой программу его работы
так, чтобы сборка продолжалась. Роботизированная сборочная линия
представлена в виде мультиагентной системы. Процессы коллективного
поведения роботов при вводе отказа в сборочную линию круговой и линейной
компоновок имитировались сетями Петри с десятками позиций и переходов. В
результате имитационных экспериментов найдены зависимости
производительности сборочной линии для разных стратегий перераспределения
программ.
Компоновка оборудования очистного забоя [10]
Горный инженер вводит в
окна мнемосхемы очистного забоя горно-геологические условия и
характеристики единиц оборудования, которые могли быть применены в забое.
Эти величины автоматически преобразуются в свойства сети Петри и вводятся
в имитатор. После имитационного моделирования работы очистного забоя на
экран выводится производительность для выбранной совокупности единиц
оборудования.
Взаимодействие экскаваторов и самосвалов при добыче полезных ископаемых открытым способом [11]
Распределенные в
пространстве экскаваторы разной производительности загружают самосвалы
разной грузоподъемности, которые вывозят горную массу на обогатительную
фабрику, в отвал или на склад. Время погрузки, рейса и разгрузки случайны.
Необходимо найти такое соотношение экскаваторов и самосвалов, при котором
не будут образовываться очереди в местах погрузки и разгрузки. Сеть
Петри, введенная в имитатор, содержит 46 позиций и 32 перехода. По
окончании имитации на мнемосхему выводятся коэффициенты использования
экскаваторов и длины очередей.
Кольцевая линия роботизированной сборки [12]
На учебном макете
сборочной линии в Эссенском университете (Германия) четыре робота
переносят паллеты с элементами электрических выключателей с кольцевого
конвейера на позицию сборки, и после сборки возвращают паллеты на
конвейер. Задача состоит в согласовании процессов взаимодействия роботов
и конвейера. Имитационная модель разработана в виде сети Петри с 26
позициями и 18 переходами. Результаты моделирования выводятся на
анимированную мнемосхему сборки. Работа выполнялась по гранту Научного
Комитета НАТО OUTR CRG № 960628 «Имитация и анимация процессов добычи угля
в России» и проекту У0043/995 «Подготовка кадров в области информационных
технологий производства для Кузбасса» Федеральной целевой программы
«Интеграция науки и высшего образования России на 2002–2006 гг.».
1. Разработанный имитатор сетей Петри может применяться в учебном процессе для анализа динамики дискретных систем.
2. С помощью имитатора можно выбирать структуру и параметры производственных систем со сложным взаимодействием дискретных элементов во времени и пространстве.
Литература
1. Мурата Т. Сети Петри: свойства, анализ и приложения//Тр. ТИИИЭР/Пер. с англ. – 1989. – Т. 77. – № 4. – C. 41–79.
2. Михайлишин А. Ю. Разработка научно-методического обеспечения для имитаци-онного моделирования функционирования сложных систем//"Открытое и дистанционное образование". Научно-методический журнал, – 2002. – № 4(8). C. 34–35.
3. Конюх В. Л. Лабораторный практикум. Основы промышленной робототехники: Методическое и программное обеспечение. – Кемерово: Кемеровский государственный университет, 1994. – 61 с.
4. Конюх В. Л., Белов Д. В. Лабораторный практикум по курсу "Гибкие производственные системы": Программно-методическое обеспечение. – Кемерово: Кемеровский государственный университет, 1995. – 47 с.
5. Конюх В. Л., Телепнев А. С. Система компьютерного допуска к лабораторным работам по курсам "Основы промышленной робототехники", "Гибкие производственные системы". – Кемерово: Кемеровский государственный университет, 1996. – 19 с.
6. Konyukh V., Mikhailishin A. Simulation of underground transport
network//Proc. of the International Carpathian Control Conference
(ICCC’2003), Koshice, May 2003. 7. Konyukh V., Davidenko V., Sturgul J.
Dynamic simulation of mine-wide transport for designing and
dispatching//Proc. of the 6-th International Symposium on Mine Planning
and Equipment Selection. – Czech Republic: Ostrava, Sept.3–6, 1997. – P.
641–646. 8. Konyukh V., Sinoviev V., Zhdanov Y., Davidenko V. Mine
Simulation and Animation: the Practical Experience//Mechanizacja i
Automatizacja Gornictwa. – 2000. № 4–5 (354). – P. 161–166. 9. Konyukh
V., Ignatiev J. Fault tolerant assembly line as multi-agent
system//Proceedings of 3-rd International Carpathian Control Conference
ICCC'2002. – Czech Republic: Malenovice. – P. 457–462. 10. Конюх В. Л.,
Гречишкин П.В. Компоновка оборудования очистного забоя мето-дом
имитационного моделирования//Вестник Кузбасского государственного
техни-ческого университета. – 2004, № 2. C. 77–81. 11. Конюх В. Л.
Имитация вариантов ведения горного производства на персональном
компьютере//Топливно-энергетический комплекс и ресурсы Кузбасса. – 2003. №
2/11. – C. 121—123.
12. Конюх В. Л., Зиновьев В. В. Примеры имитации и анимации дискретных систем. СD-ROM. – Кемеровский научный центр СО РАН,
2003.
Знаете ли Вы, что имитационная модель, simulation model - это специальный программный комплекс, позволяющий имитировать деятельность какого-либо сложного объекта. Он запускает в компьютере параллельные взаимодействующие вычислительные процессы, которые являются по своим временным параметрам (с точностью до масштабов времени и пространства) аналогами исследуемых процессов.
 На рис. 1 показана сеть Петри, имитирующая
работу станка. При наличии маркера (заготовки) в позиции Р1 открывается
переход T1 и маркер переходит в позицию Р2 (заготовка во входном
накопителе). Если станок настроен на данную операцию (наличие маркера в
позиции Р4), срабатывает переход T2 и происходит процесс обработки
заготовки на станке (Р3). По окончании обработки открывается переход T3 и
деталь поступает в выходной накопитель (Р5).
На рис. 1 показана сеть Петри, имитирующая
работу станка. При наличии маркера (заготовки) в позиции Р1 открывается
переход T1 и маркер переходит в позицию Р2 (заготовка во входном
накопителе). Если станок настроен на данную операцию (наличие маркера в
позиции Р4), срабатывает переход T2 и происходит процесс обработки
заготовки на станке (Р3). По окончании обработки открывается переход T3 и
деталь поступает в выходной накопитель (Р5).