Работа силы - мера действия силы, зависящая от её модуля и направления и от перемещения
точки приложения силы. Если сила
постоянна по модулю и направлению, а перемещение
прямолинейно (рис. 1), то Р. определяется
равенством где-
угол между направлениями силы и перемещения.
Если a < 90°, то А > 0, а если 180°a
> 90°, то А < 0; если же a = 90°,
т. е. если сила перпендикулярна перемещению, то А = 0. Единицы измерения
Р.- джоуль, эрг (1 эрг = 10-7 Дж) и кило-грамм-сила на 1 метр (1
кгс·м9,81 Дж).
Рис. 1.
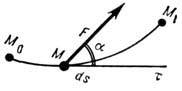
В общем случае для вычисления Р. силы вводят
понятие элементарной работы
где ds - элементарное перемещение точки приложения силы, a
- угол между силой и касательной к траектории её приложения, направленной в
сторону перемещения точки, -
проекция силы на эту касательную (рис. 2). В декартовых координатах х,
y, z - координаты точки её приложения.
Рис. 2.
где-
проекции силы на координатные оси;
В обобщённых координатах
где qi- обобщённые координаты,
Qi- обобщённые силы. Для сил, действующих на тело, имеющее
неподвижную ось вращениягде
Мz - сумма моментов сил относительно оси вращения, f
- угол поворота тела. Для сил давления dA = pdV, где p - давление,
V - объём.
Работа силы на конечном перемещении определяется
как предел интегральной суммы соответствующих элементарных работ и при перемещении
М0М1 выражается криволинейным интегралом
Для потенциальных сил dA = dU или
dA = -dП, где U - силовая функция, П - потенциальная
энергия системы, А = U1 - U0 или
А = П0 - П1 где U0,U1,
П0, П1 - значения соответствующих величин в начальном
и конечном положениях системы; в этом случае Р. не зависит от вида траекторий
точек приложения сил. При движении механич. системы сумма работ всех действующих
сил на нек-ром перемещении этой системы равна изменению её кинетической энергии
Т на этом же перемещении, т. е.
Понятие работы широко используется в механике и в других областях физики,
а также в технике.
 постоянна по модулю и направлению, а перемещение
постоянна по модулю и направлению, а перемещение  прямолинейно (рис. 1), то Р. определяется
равенством
прямолинейно (рис. 1), то Р. определяется
равенством где
где -
угол между направлениями силы и перемещения.
Если a < 90°, то А > 0, а если 180°
-
угол между направлениями силы и перемещения.
Если a < 90°, то А > 0, а если 180° a
> 90°, то А < 0; если же a = 90°,
т. е. если сила перпендикулярна перемещению, то А = 0. Единицы измерения
Р.- джоуль, эрг (1 эрг = 10-7 Дж) и кило-грамм-сила на 1 метр (1
кгс·м
a
> 90°, то А < 0; если же a = 90°,
т. е. если сила перпендикулярна перемещению, то А = 0. Единицы измерения
Р.- джоуль, эрг (1 эрг = 10-7 Дж) и кило-грамм-сила на 1 метр (1
кгс·м 9,81 Дж).
9,81 Дж).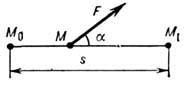
 где ds - элементарное перемещение точки приложения силы, a
- угол между силой и касательной к траектории её приложения, направленной в
сторону перемещения точки,
где ds - элементарное перемещение точки приложения силы, a
- угол между силой и касательной к траектории её приложения, направленной в
сторону перемещения точки,  -
проекция силы на эту касательную (рис. 2). В декартовых координатах х,
y, z - координаты точки её приложения.
-
проекция силы на эту касательную (рис. 2). В декартовых координатах х,
y, z - координаты точки её приложения.
 -
проекции силы на координатные оси;
-
проекции силы на координатные оси;
 где
Мz - сумма
где
Мz - сумма