Звуковидение - получение оптически видимых
изображений предметов с помощью акустич. волн. В зависимости от
назначения и используемого диапазона частот применяют устройства 3.,
основанные на след. принципах.
Линзовое 3., при к-ром для построения акустич. изображения предмета
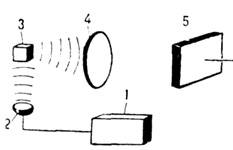
используется звуковая оптика (линзы акустические). Предмет 3 "освещается" звуковым полем от излучателя 2 (рис. 1), а акустич. линза 4 создаёт звуковое изображение предмета в нек-рой плоскости, где устанавливается пространств. детектор 5,
преобразующий распределение поля давлений либо непосредственно в оптич.
изображение, либо в электрич. сигнал с последующим преобразованием в
оптич. изображение.
Рис. 1. Принцип линзового звуковидения: 1 - УЗ-генератор; 2 - излучатель; 3 - предмет; 4 - акустическая линза (объектив); 5 - акустический пространственный детектор с электрическим или оптическим преобразованием сигнала.
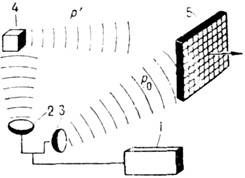
Рис. 2. Принцип голографического звуковидения: 1 - УЗ-генератор; 2, 3 - излучатели; 4 - предмет; 5 - акустический пространственный детектор.
Голографическое 3. использует принцип голографии (рис. 2) и не нуждается в звуковой оптике. Помимо рассеянного предметом поля р' на плоскость пространств. детектора 5 направляется т. н. опорная звуковая волнар0. Возникающая интерференц.
картина стоячих волн (акустич. голограмма) регистрируется
пространств. детектором. Восстанавливается изображение предмета либо
методами с использованием когерентного света, либо электронными
методами, обычно цифровыми (см. Голография акустическая).
Локационное
Звуковидение основано на принципах эхолокации и заключается в том, что излучающее
устройство (часто оно же и приёмное) "освещает" предмет узким звуковым
лучом, сканирующим по пространству в одной или двух плоскостях.
Изображение предмета строится по отражённым от него сигналам
последовательно, в соответствии с выбранным законом сканирования. Обычно
используется импульсное облучение предмета, к-рое даёт возможность
разрешения по продольной координате (дальности).
Для преобразования пространств. распределения давления в звуковом поле в
видимое оптич. изображение используются разнообразные методы визуализации звуковых полей,
осуществляющие либо непосредственное акустооптич. преобразование, либо с
промежуточным преобразованием акустич. сигналов в электрические и далее
в оптические.
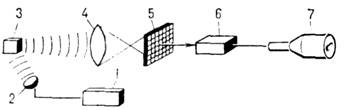
Рис. 3. Схема линзового звуковиденип с электронным сканированием: 1 - УЗ-генератор; 2 - излучатель; 3 - предмет; 4 - акустическая линза (объектив); 5 - мозаика пьезоэлектрических преобразователей; 6 - электронный коммутатор; 7 - электронно-лучевая трубка.
Для акустооптич. преобразования широко применяются методы поверхностного
рельефа, а в последнее время - жидкокристаллич. преобразователи.
Акустооптич. эффект в жидких кристаллах основан на способности их
молекул изменять заданную ориентацию под воздействием УЗ-поля. Изменение
ориентации молекул вызывает либо поглощение проходящего света, либо его
рассеяние (при работе на отражение), благодаря чему и получается
видимое изображение предмета.
Наиб. применение в 3. получили методы визуализации, основанные па
промежуточном преобразовании акустич. сигналов в электрические с помощью
пьезоэлектрич. датчиков, поскольку эти методы обладают самой высокой
чувствительностью. Такое преобразование используется в линзовом и локац.
звуковидение (рис. 3), для чего в плоскости формирования акустич. изображения
устанавливается двумерная матрица пьезоэлектрических преобразователей;
сигналы с них считываются с помощью электронного коммутатора и подаются
на модулятор, управляющий яркостью луча электроннолучевой трубки,
сканирование к-рого по экрану осуществляется синхронно с работой
коммутатора. Этот же принцип используется и в голографич. 3. с оптич.
восстановлением голограмм, с тем отличием, что сигналы с электронного
коммутатора подаются на пространственно-временной модулятор когерентного света
и управляют либо его локальным коэф. поглощения, либо коэф.
преломления. При этом модулятор выполняет роль оптич. голограммы,
восстановление изображения но к-рой происходит с помощью когерентного света (рис. 4).
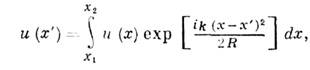
В основе теоретич. описания всех принципов 3. лежит аналитич. зависимость между полем источника и(х)и полем и(х')на нек-ром расстоянии R от него (интеграл Кирхгофа). При R>>l и D>>l (где l - длина волны звука, D - входная апертура) поле и(х)и поле и(х')связаны соотношением (преобразование Френеля):
где х1 и x2 - область существования и(х). При R>> D2/l. это соотношение переходит в преобразование Фурье:
Эти соотношения лежат в основе всех принципов 3., и в частности в методе
цифрового восстановления изображений, где для ускорения вычислений
используются алгоритмы быстрого Фурье преобразования.
Качество звуковых изображений в 3. зависит от характера взаимодействия звуковых волн с предметом, от размеров входных апертур D
и используемых длин волн l. В общем случае длины УЗ-волн, используемых в
звуковидении, гораздо больше, чем длины оптпч. волн. и поэтому акустич.
изображение предметов будет более "грубым" и содержать гораздо меньше
мелких деталей, чем оптическое. Для устранения эффекта бликовой
структуры в звуковидении используют широкополосное излучение (аналог белого света) и освещение предмета со многих ракурсов (аналог диффузного освещения в фотографии).
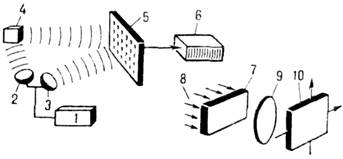
Рис. 4. Схема голографического звуковидения с оптическим восстановлением изображения; 1 - УЗ-генератор; 2,3 - излучатели; 4 - предмет; 5 - набор пьезопреобразователей; 6 - коммутатор; 7 - пространственно-временной модулятор света с электронным управлением; 8 - световой поток от лазера; 9 - проекционная оптич. система; 10 - плоскость наблюдения.
Разрешающая способность в звуковидении по поперечной координате dх зависит от волновых размеров В приёмных пространств. детекторов и определяется по ф-ле: dx=lR/D = R/B, где R - расстояние _до{до} предмета, B=D/l. Разрешение тем лучше, т. е. dх тем меньше, чем больше В. В практич. 3. величина B~300-400 (в то время как в оптике B~104-105
и более). По этой причине линзовое 3. имеет огранич. применение, т. к.
звуковые линзы больших волновых размеров тяжелы, громоздки и вызывают
большое затухание УЗ. Разрешение по продольной координате (глубине,
дальности) dR также зависит от волновых размеров и расстояния: dR=lR2/D2=R2/BD.
Оно ухудшается пропорц. квадрату расстояния, поэтому измерение
продольных координат осуществляется обычно на расстояниях порядка R~D, т. е. в непосредств. близости от плоскости приёма. В тех ситуациях, когда объект расположен на расстоянии R>>D,
прибегают к импульсному облучению, и в этом случае разрешение по
дальности (глубина) тем лучше, чем короче длительность сигнала, а при
излучении широкополосных сигналов - чем шире полоса излучаемых частот.
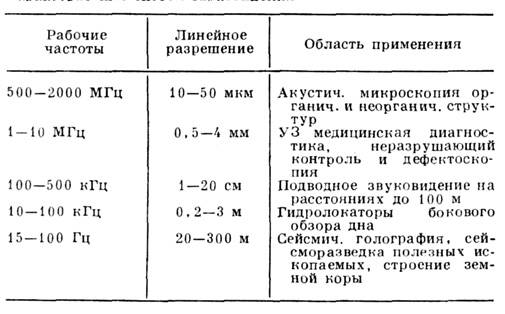
Диапазон частот, применяемых в 3., весьма широк, и соответственно разные
системы звуковидения могут существенно различаться по разрешающей способности
(табл.).
В зависимости от частоты и области применения в 3. используют разл. типы
приёмных п излучающих антенн. На частотах 0,1-2 МГц обычно применяют
пьезоэлектрич. керамич. приёмники и излучатели (последние с электронным
управлениом характеристикой направленности). В системе подводного 3. на
частотах единиц и десятков кГц пользуются наряду с пьезокерамич.
излучателями магнитострикционными. В сейсмич. голографии в качестве излучателей используют вибраторы, пневматич, излучатели и просто взрывы, а в качестве приёмников - гидрофоны и геофоны.
Характеристики систем звуковидения
3. применяется в океанологии для получения изображений морского дна и
природных структур, поиска затонувших предметов, обеспечения подводной
навигации, осмотра подводных сооружений и др. В дефектоскопии
3вуковидение используется при УЗ-контроле для обнаружения скрытых дефектов в
разл. материалах и конструкциях (раковины, трещины, инородные включения и
др.). В медицине оно применяется для получения информации о структуре
внутр. органов (сердца, печени, почек), сосудов и др. благодаря тому,
что УЗ хорошо поглощается мягкими тканями, в отличие от рентг.
излучения, и практически безопасен для пациента.
Литература по звуковидению
Свет В. Д., Методы акустической голографии, Л., 1976;
Знаете ли Вы, что, как и всякая идолопоклонническая религия, релятивизм представляет собой инструмент идеологического подчинения одних людей другим с помощью абсолютно бессовестной манипуляции их психикой для достижения интересов определенных групп людей, стоящих у руля этой воровской машины? Подробнее читайте в FAQ по эфирной физике.